November Field Trials
Multibeam Sonar as a Tool to Study Foraging Interactons of Steller Sea Lions and
Fish - Test of Concept in Prince William Sound, Alaska
§Conducted by:
- Ward Testa (National
Marine Mammal Laboratory-Alaska Fisheries Science Center)
-
§Gary D. Melvin (St. Andrews
Biological Station-Canadian Dept of Fisheries and Oceans)
§
- Jennifer M. Burns
(University of Alaska Anchorage)
With Logistical Support from
- Alaska Department of Fish and Game (Tom Gelatt, R/V
Solstice, P/V Stimson)
- Alaska Science Center, USGS - Biological Resources
Division (Jim Bodkin, George Esslinger)
Document Map
Purpose of the trials
(TOP)
To determine if we could use multibeam sonar to
-
§Detect and track Steller
sea lions in multibeam sonar images
-
§Image both sea lions and potential prey at the same time
-
§Follow sea lions during actual foraging dives
-
§Follow sea lions during foraging bouts
To determine what modifications / equipment might be necessary to create
a functional Multibeam Animal Tracking System
Equipment
(TOP)
| The Simrad SM2000 Multibeam Sonar with 180-degree head |
The SM2000 in a nutshell |
  |
200 kHz transmitted pulse
128 electronically focused returning beams
180° swath (120° shown)
782 intervals/beam
Range 400 m (200 effective)
20 or 1.5 degree fore-aft
Completely digital data output
Principle applications: detailed bottom mapping, quantitative midwater
fisheries assessment
Limited software for analyses
|
|
For this trial we borrowed Dr. Gary Melvin's SM2000
|
|
Modifications for field deployment on a small boat in Alaska
A bracket was bolted to the side of the research vessel "Mousse Dancer"
(loaned by US Fish and Wildlife Service) so that the SM2000 could be quickly
deployed and recovered. The mounting bracket allowed the head to be manually
rotated 180 degrees to facilitate locating and tracking animals underwater
 |
The SM2000 pole mounted for deployment and laying on the
back deck of the Mousse Dancer. |
 |
Dr. Ward Testa retrieving the SM2000 from the
side-mounted bracket at night. Since the boats maximum speed with the SM2000
deployed was ~ 6 knots, the unit was only deployed during active tracking |
 |
Here you can see Dr. Gary Melvin viewing output from the
SM2000, which was mounted under the console. In addition to the screen, the
very crowded bridge also housed the radar, VHF receiver, depth sounder, and
steering. The cabin door just closed when all three of us were inside (and
since it was often below freezing, we all wanted to be inside as much as
possible!) . |
 |
While conducting the field trials we lived aboard the R/V
Solstice |
The Study Animals
and Setting
(TOP)
 |
Steller sea lions were outfitted with Satellite Data
Recorders and VHF tags. In this image, the sea lion is carrying a SDR (Argos
PTT) on the head, and a VHF tag on the back. |
 |
Following release, tagged sea lions head back to the
haulout where they were captured. This is the Glacier Island haulout in
Prince William Sound, AK |
 |
Tagged animals were subsequently located using the VHF
direction finding antenna system mounted on Mousse Dancer. Two
antennas can be seen in this image |
Trial Results
(TOP)
November 14, 2003
- Location: Perry Island haulout
- Weather: Cold (28F), windy (10-15 knots), swell with some chop
- We observed a group of sea lions (~ 10 animals) milling about at the
surface near the Perry Island haulout.
- Animals did not appear to be foraging in a directed fashion.
November 15, 2003
- Location: Glacier Island haulout
- Weather: Cold (25F), windy (10-15 knots), swell with some chop
- One sea lion observed interacting with a small tightly packed school of
fish at depth of ~30 m

November 20, 2003
- Location: Dutch Island Group (area where satellite tagged sea lions were
known to be foraging)
- Weather: Cool (35F), no wind, flat seas
- Observed fish schools and foraging seabirds
- Encountered sea lions in same area and observed sea lions with multibeam
sonar
- Sea lions were diving to the rocky bottom in 80-120 m of water
- Sea lions traveled directly to the bottom
- Sometimes sea lions dove through midwater fish signals to reach bottom
- At bottom, the sea lion's sonar reflectance was lost in dense fish schools
and highly saturated bottom signal
- Sea lions generally resurfaces 100+m away from site of submergence
- Suggests that sea lions were traveling and foraging along bottom
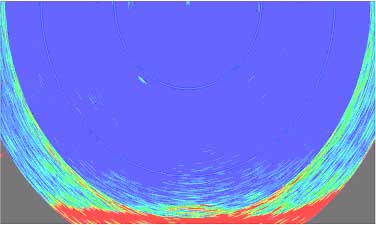
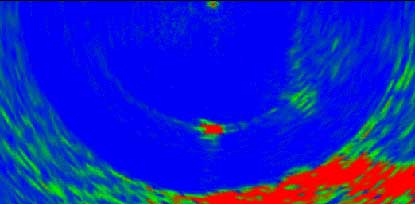
Sequential snapshots (8
sec apart) from a Simrad SM-2000 multibeam sonar of a Steller sea lion diving
toward a school of fish near the bottom of Prince William Sound. The vertical
scale is 150 m. The strongly reflective signal towards the center is the sea
lion, while the more faint signals are fish.
§Conclusions
(TOP)
- Multibeam sonar was
successfully used to observe sea lions diving and entering fish schools in
mid-water and near the bottom of Prince William Sound
-
§The
natural acoustic properties of sea lions make them highly visible at
surface and in midwater, but they tend to disappear when they reach dense
fish schools or bottom
§Two
critical technical developments are needed
-
§Acoustic
transponders
have been used to locate animals in other high frequency sonars, and could
resolve the problem of following target animals with multibeam sonar
(Note: these are not simple acoustic “pingers”, but devices that detect
the sonar pulse and re-emit the same frequency within the pulse duration
of the activating sonar
-
§Robust
pan and tilt controls
are needed to enable use of the sonar at higher boat speeds (>5 knots) and
allow a single operator to track a target while interpreting sonar images
Future Directions
(TOP)
-
§Further
trials of multibeam as tool to identify the immediate prey field of diving
Steller sea lions
- Next trial planned June 2004
- Developing a coollaborative project with University
of New Hampshire to develop Multibeam Animal Tracking System (MATS)
(proposal submitted to NSF February 2004)